论文PINNs4Drops: Convolutional feature-enhanced physics-informed neural networks for reconstructing two-phase flows(“PINNs4Drops: 用卷积特征增强的物理信息神经网络用于重建两相流动”)的研究聚焦于解决两相流动的三维重建问题,特别是基于单视角数据的重建挑战。在工程应用中,两相流动现象(如液滴在气体环境中的运动)广泛存在,应用场景包括喷雾冷却、燃烧、油水分离、燃料电池等。这些场景中,界面和内部流动的复杂动态信息对于性能的优化和控制至关重要。然而,传统的实验和数值模拟技术在获取这些信息时面临诸多限制,特别是只能进行二维的观测或计算成本过高。
为了克服这些局限,研究者提出了一种融合了物理控制方程和深度学习模型的卷积特征增强的物理信息神经网络(PINNs)方法。通过结合卷积神经网络(CNN)的特征提取能力和物理信息神经网络(PINNs)的物理规律建模能力,研究者实现了对液滴撞击和两相界面演变的三维高精度重建。
论文作者为Maximilian Dreisbach, Elham Kiyani, Jochen Kriegseis, George Karniadakis, Alexander Stroh,来自Karlsruhe Institute of Technology和Brown University。
1. 引言
引言部分首先强调了两相流动的重要性和挑战性,特别是在复杂的气液界面和流场重建方面。研究者指出,传统的测量手段如暗场成像和粒子图像测速(PIV)只能提供二维数据,且面临诸如多角度观测难以实现、光学访问受限等问题。
为了突破这些限制,近年来,卷积神经网络被应用于从实验数据中提取丰富的特征,尤其是在影像数据的上下文理解和三维结构重建方面。基于这一基础,PINNs的出现为深度学习方法带来了新的发展,即通过将物理控制方程直接融入网络的损失函数中,网络不仅仅是拟合数据,同时也遵循流体动力学的控制规律,从而在数据缺乏的情况下仍能做出精确预测。
2. 物理信息神经网络(PINNs)与卷积特征增强
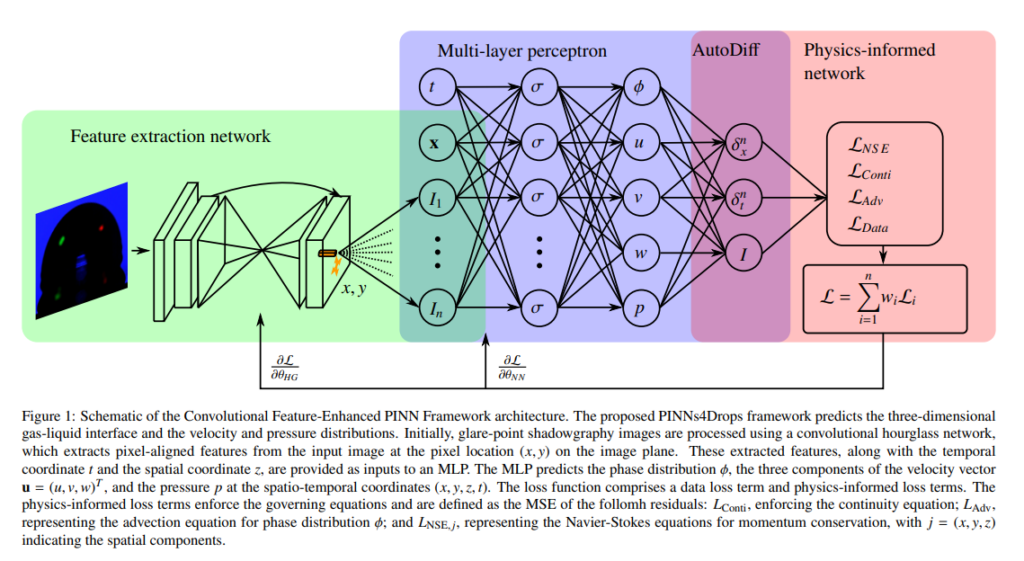
论文提出了一种新型的卷积特征增强的物理信息神经网络框架(PINNs4Drops),用于三维重建气液界面及其相应的速度场和压力场。PINNs结合了深度学习和传统物理方程(如不可压缩的Navier-Stokes方程)的优点,其主要特点是:
- 物理信息融合:通过将物理控制方程纳入网络训练,PINNs确保了网络预测符合流体的物理规律,即使在数据不完整或受噪声影响的情况下,仍可进行可靠的预测。
- 卷积特征提取:采用卷积神经网络来处理输入图像,利用卷积层提取影像中的空间结构特征,这些特征为气液界面和内部流场的重建提供了更丰富的上下文信息。
论文中提出的框架被称为“卷积特征增强的PINNs”,其在传统PINNs的基础上增加了卷积特征提取模块,使得网络可以在图像数据上进行更深入的学习,从而提高对气液界面复杂几何形状的重建能力。
3. 方法详解
3.1 数据生成与实验配置
本研究通过直接数值模拟(DNS)生成了用于训练和验证的数据集。研究中首先使用数值模拟得到液滴撞击过程的三维几何和流场数据,然后基于这些数据生成合成图像。这些合成图像的生成方法包括在渲染环境中再现实验中的光学配置,通过物理精确的光线追踪渲染生成包含反射点的影像,模拟了液滴界面的反射和折射光学特征。
实验采用的影像获取方法为彩色编码暗场成像。这一方法通过在不同位置设置不同颜色的光源,使得在液滴界面上形成不同颜色的反射点,从而提供额外的三维信息。这些反射点的颜色和位置能够帮助网络理解液滴界面的几何信息,为三维重建提供更丰富的输入。
3.2 网络架构
网络架构由以下几个部分组成:
- 卷积特征提取网络:
- 输入为暗场成像获取的图像。
- 使用卷积神经网络(CNN)来提取像素对齐的特征。卷积神经网络通过逐层的卷积操作,能够识别出图像中的关键模式和特征,例如液滴界面的轮廓和光学反射点。
- 多层感知机(MLP):
- 将提取到的卷积特征与空间(x, y, z)和时间(t)坐标一起输入到多层感知机。
- 多层感知机负责预测气液相分布(ϕ)、三维速度分量(u, v, w)以及压力(p)。
- 物理信息网络:
- 使用自动微分的方式计算预测输出相对于空间和时间坐标的导数。
- 通过这些导数,计算物理控制方程的残差,并将其作为物理信息损失项,确保预测符合不可压缩Navier-Stokes方程、连续性方程以及界面演化方程。
3.3 物理控制方程与损失函数
为了确保网络输出符合流体的物理规律,研究者将不可压缩的单场Navier-Stokes方程、连续性方程和界面演化方程嵌入到网络的损失函数中。这些方程具体为:
- Navier-Stokes方程:用于描述速度场和压力场的演变。
- 连续性方程:用于确保流体在空间中的守恒性,即不可压缩性。
- 界面演化方程:采用体积液体法(Volume of Fluid, VoF)和相场法(Phase-field)两种方式描述气液界面的变化。体积液体法通过体积分数α描述流体界面,α取值为0到1之间,表示不同相在空间单元中的占比;相场法则通过相位变量C表示界面,C的值在-1和1之间。
物理损失项是通过自动微分计算得到的,网络的目标是最小化这些物理损失项以及基于实验数据的监督损失项,以实现对两相流动的精确重建。
为了提高重建的精度,论文中还提到了一些技术细节:
- 采样方法:针对气液界面的位置,研究者在界面附近进行了采样点的密集化处理,以便更好地捕捉界面附近的复杂物理特性。
- 损失权重动态调整:采用固定权重和自适应权重相结合的方法,动态地平衡物理损失与数据驱动的损失,确保网络能够有效地同时学习数据和物理规律。
4. 结果与讨论
4.1 合成数据验证
研究首先在合成数据集上验证了所提出的PINNs4Drops模型的有效性。合成数据是基于数值模拟的结果,通过渲染技术生成的,因此既包含真实实验的复杂光学特性,又具有数值模拟的精确性。PINNs4Drops对三维气液界面的重建在三维交并比(3D-IOU)方面取得了显著的提升,达到了0.967,相比于基线的纯数据驱动方法提高了0.9%。
值得注意的是,使用体积液体法(VOF)作为界面演化方法的PINNs相较于相场法在界面重建精度上表现更优。这主要是因为相场方法在处理高密度比时稳定性较差,而VOF方法通过引入体积分数的对流方程,能够有效地避免高密度比下的数值发散问题。
4.2 三维流场预测
PINNs4Drops不仅可以重建气液界面,还能够预测液滴内部和周围的三维速度场和压力场。在速度场的预测中,网络对于液滴内部的速度分布精度较高,而对于气相区域的预测精度略低。造成这种差异的主要原因是液相区域的物理损失项贡献更大,从而更好地指导了液相内的流场重建。此外,气液界面附近的预测精度普遍较高,这得益于在界面附近进行的自适应采样和残差加权策略。
通过比较不同模型的预测结果,发现VOF-PINNs在预测精度方面整体优于基线的纯数据驱动模型和相场法的PINNs,尤其是在速度和压力场的预测上具有更好的拓扑一致性和数值精度。
5. 实验数据的应用与挑战
在实验数据中的应用验证了PINNs4Drops的实际可行性。通过对撞击液滴的三维重建,网络成功地重现了气液界面的动态演变过程,并精确地预测了界面附近的速度和压力场。然而,实验数据与数值模拟数据之间的匹配问题依然是一个挑战。研究者通过生成与实验条件相符的合成图像来解决这一问题,从而确保训练数据和验证数据在光学特性上保持一致。
为了进一步提升实验数据的重建精度,研究中使用了多种数据增强技术,如随机平移输入图像,以提高网络的泛化能力。同时,通过逐步增加数据损失项的权重,网络能够首先学会预测精确的气液界面,然后再对流场和压力进行更复杂的建模。
6. 结论
本研究提出了一种卷积特征增强的物理信息神经网络(PINNs4Drops),成功实现了从单视角暗场成像数据中对两相流动的三维重建和流场预测。相比于传统的实验测量方法,该方法在数据需求、计算成本和预测精度之间找到了平衡。其主要贡献在于:
- 融合物理规律与深度学习:通过将流体动力学方程嵌入损失函数,PINNs4Drops能够在数据不足的情况下提供物理上合理的预测。
- 卷积特征提取:结合卷积神经网络对图像的空间特征提取能力,显著提高了对气液界面的重建精度。
- 高效的数据利用:通过光学成像和数值模拟相结合的方法,生成了具有真实实验光学特性的合成训练数据,从而有效解决了实验数据和模拟数据不匹配的问题。