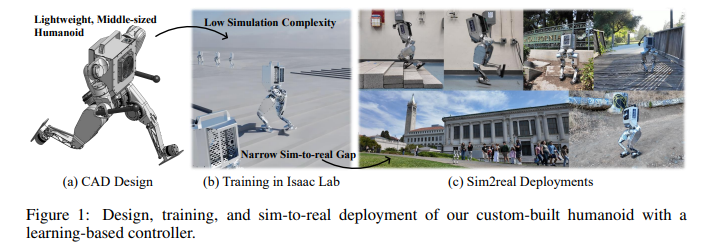
Berkeley Humanoid(伯克利人形机器人研究平台)是一个可靠且低成本的中型人形机器人研究平台,专为基于学习的控制而设计。其轻量化自制机器人设计旨在具备低模拟复杂度、类人运动和对摔倒的高可靠性。该机器人缩小了模拟到现实的差距,通过简单的强化学习控制器和轻量域随机化,实现了在各种户外环境中敏捷且稳健的运动。该机器人具有在各种地形上的行走能力,包括陡峭的未铺设小径和单腿跳跃,证明了其高性能的动态行走能力。
论文Berkeley Humanoid: A Research Platform for Learning-based Control详细介绍了此机器人平台,作者为Qiayuan Liao, Bike Zhang, Xuanyu Huang, Xiaoyu Huang, Zhongyu Li, Koushil Sreenath,主要来自UC Berkeley。
论文内容概要如下:
一、介绍
对能够快速部署基于学习的策略、能承受摔倒和故障且成本低廉的中型人形机器人有着强烈需求。目前的大多数双足和人形机器人较大,操作不安全且需要团队操作。相比之下,短腿机器人由于重量轻,实验更容易进行,并且摔倒对环境和机器人本身的损害较小。这些机器人可以在狭窄的实验室空间内测试,制造粗糙地形进行实验验证相对简单。因此,可靠、低成本、短腿的人形机器人需求巨大。
二、设计原则
- 模拟友好性:为了降低模拟成本,避免使用弹簧或阻尼器等柔性组件,以及任何闭合运动链,所有致动器均直接作为关节使用。这种设计使得在训练过程中我们可以专注于关节模拟,而不必考虑致动器动态。
- 可靠且低成本:为了提高耐用性,机器人使用了高性能材料,如7075和6061铝。电缆通过关节的中空轴跨过两个运动体,从而减少由于关节运动造成的磨损。此外,自定义的准直接驱动(QDD)致动器允许估计关节扭矩,而无需添加应变片,从而进一步提高机器人的可靠性。整机成本控制在1万美元左右。
- 实验友好性:得益于适当选择的尺寸和轻量材料,机器人重量仅为16千克,单人即可进行实验。所有实验均在这种设置下完成,最大限度地减少了实验负担。
- 类人设计:机器人采用类人的设计,具有每条腿6个自由度,这种设计模仿了人类的主要运动模式,使机器人能够在挑战性静态姿态下保持稳定,并在模仿人类动作时提供保护。
三、基于学习的控制器
我们提出了一个最简化的RL控制器,仅使用即时状态反馈作为输入,避免了人类偏见。控制器使用基础多层感知器(MLP)网络,通过PPO算法在Isaac Lab中进行训练。RL策略以50Hz执行,状态估计器以1kHz运行,PD控制器以25kHz运行。这种最简化的RL控制器验证了我们的硬件设计对于基于学习的控制的适用性,确保在训练中表现出的稳健和敏捷性能能够在真实机器人上得到充分展示。
四、实验验证
- 学习控制性能:机器人能够在各种地形上进行全方向行走,包括向前、向后、左右转向等。在不同地形上,如草地、砖块人行道、未铺设的小径、柏油路等,均表现出稳健的运动能力。
- 抗扰性:机器人能够从外部扰动中恢复,如在实验室环境中被踢到时,机器人能够立即响应,重新获得稳定性并恢复行走。
- 长距离行走:机器人能够在UC Berkeley校园内连续行走10分钟,跨越多个地形,行走总距离为364米,并能够稳定地爬上陡峭且狭窄的未铺设小径。
五、硬件可靠性
我们记录了机器人在各种地形上共38次摔倒,硬件未出现任何损坏。这证明了机器人硬件设计的可靠性。
六、结论
伯克利人形机器人是一个可靠且低成本的基于学习的双足行走控制研究平台,具备低模拟复杂度、类人运动范围和对摔倒的高可靠性。通过在各种复杂地形上的稳健户外实验,进一步证明了该平台在基于学习的控制中的有效性和小的模拟到现实的差距。未来,该平台将致力于实现大规模的真实世界学习部署。