SkyJEPA模型,实现四旋翼无人机控制的长时域预测、可解释、实时性和零样本任务泛化
论文SkyJEPA: Learning Long-Horizon World Models for Zero...
Read MoreBoston Dynamics 与 Google DeepMind 宣布建立 AI 合作伙伴关系
Boston Dynamics 与 Google DeepMind 在 CES 2026(拉斯维加斯)宣布建立...
Read More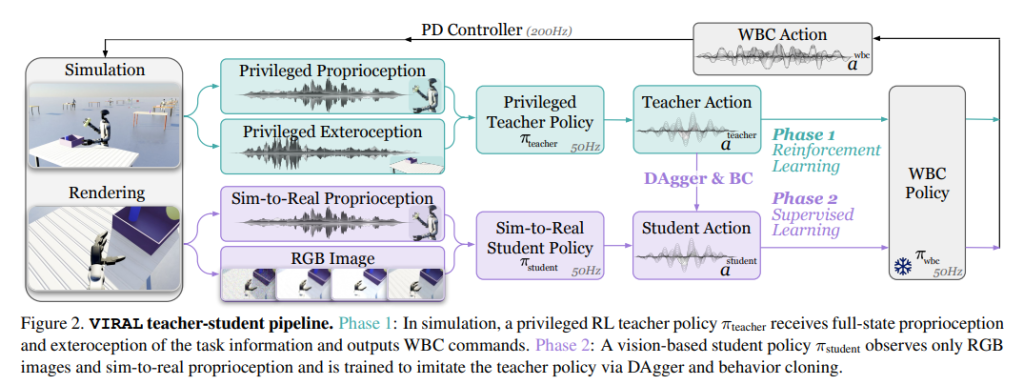
VIRAL:实现完全在仿真中学会类人机器人移动操作技能,并且无需真实世界微调就能直接部署到真机(零样本 sim-to-real)
论文 VIRAL: Visual Sim-to-Real at Scale for Humanoid Loco...
Read More
包含数据/模型/工程三位一体内容的机器人学习(Robot Learning)教程
Robot Learning: A Tutorial是一篇面向研究者与实践者的“机器人学习”教程型综述,主张在...
Read MoreWorld Labs:“空间智能”(spatial intelligence)公司
一、基本信息与创始背景 二、技术方向与产品愿景 World Labs 致力于开发一种被称为 “Large Wo...
Read More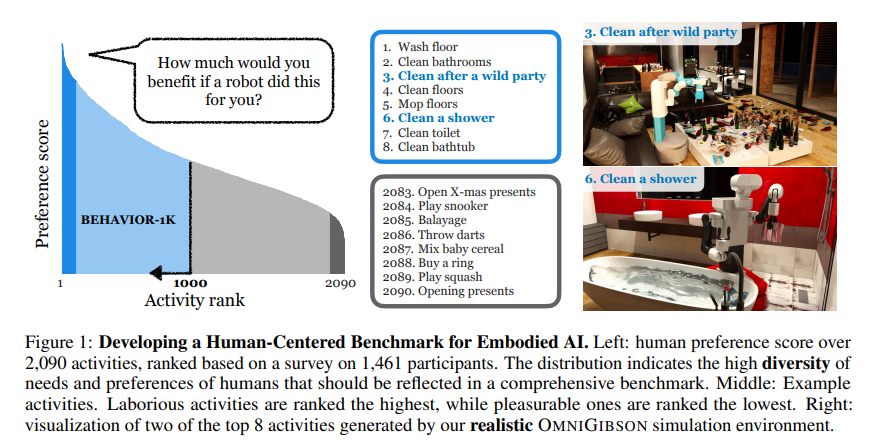
BEHAVIOR-1K:面向“人类真实需求”的具身智能/家用机器人基准
BEHAVIOR-1K 是一个面向“人类真实需求”的具身智能/家用机器人基准:它把 1,000 个日常家庭活动...
Read More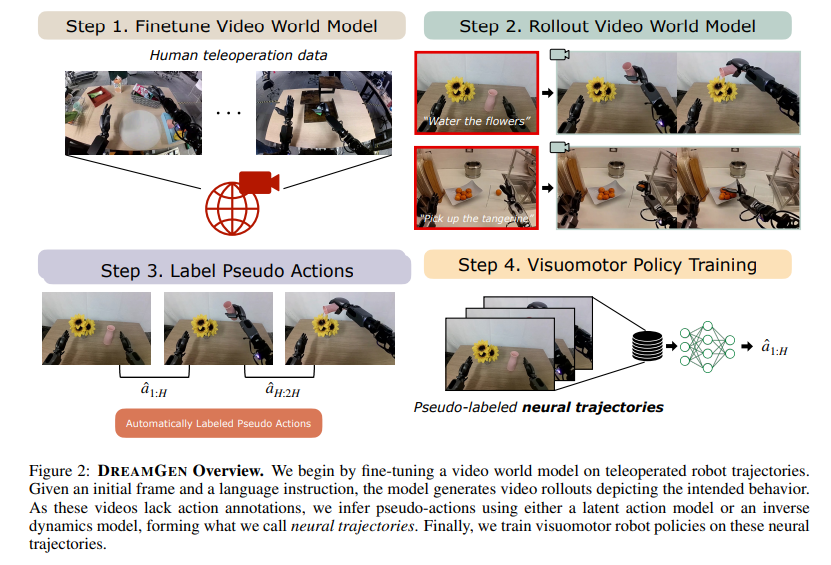
DreamGen:利用神经轨迹(Neural Trajectories)生成合成数据,助力机器人学习的数据获取与模型泛化
论文DreamGen: Unlocking Generalization in Robot Learning...
Read More“搜索本身将进化成包含AI模式(AI Mode)的新形态…搜索不会被替代,而是被重新定义”
近日,主持人 David Friedberg 与 Alphabet CEO 桑达尔·皮查伊(Sundar Pi...
Read More
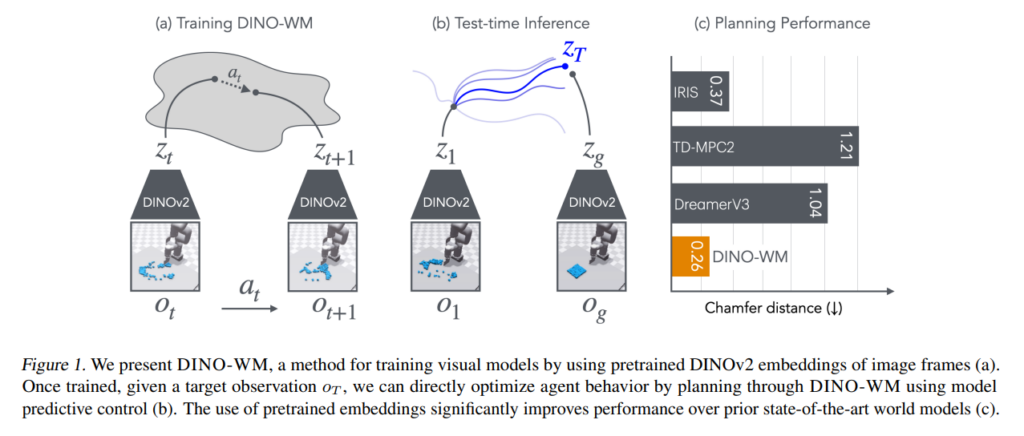
DINO-WM:基于预训练视觉特征,可实现零样本(Zeor-shot)规划的世界模型(World Model )
近年来,机器人技术和具身人工智能(Embodied AI)领域取得了显著进展,特别是在模仿学习(Imitati...
Read More