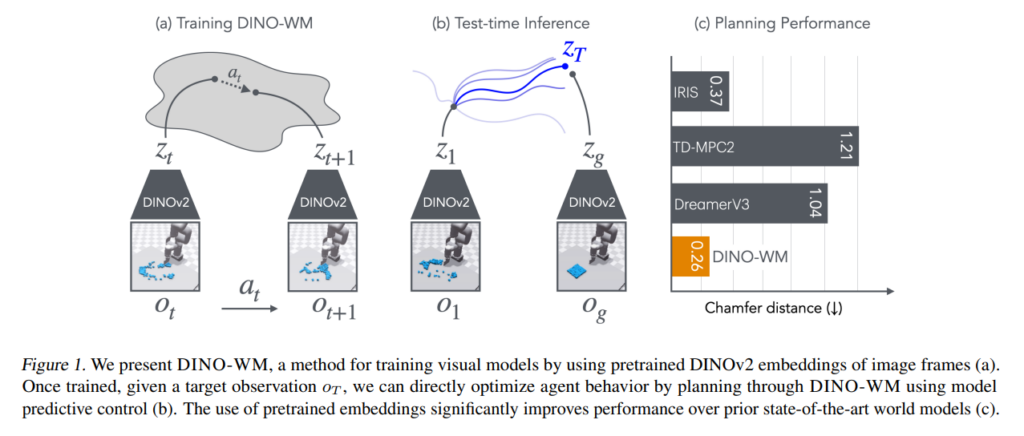
DINO-WM:基于预训练视觉特征,可实现零样本(Zeor-shot)规划的世界模型(World Model )
近年来,机器人技术和具身人工智能(Embodied AI)领域取得了显著进展,特别是在模仿学习(Imitati...
Read More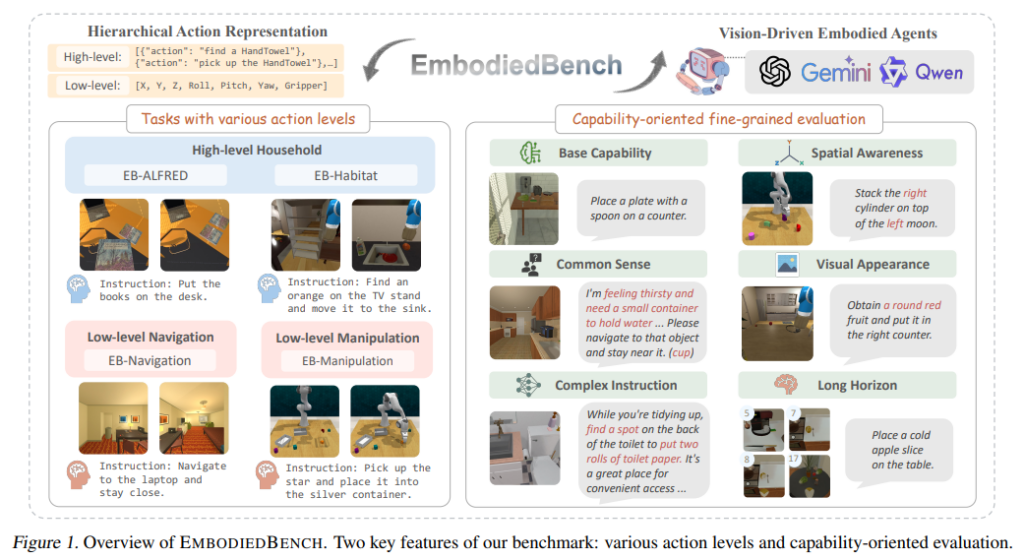
EmbodiedBench:专门用于评估视觉驱动具身智能体(Vision-Driven Embodied Agents)的基准测试框架
近年来,具身智能体(Embodied Agents)在人工智能研究中受到了越来越多的关注。这些智能体需要具备理...
Read More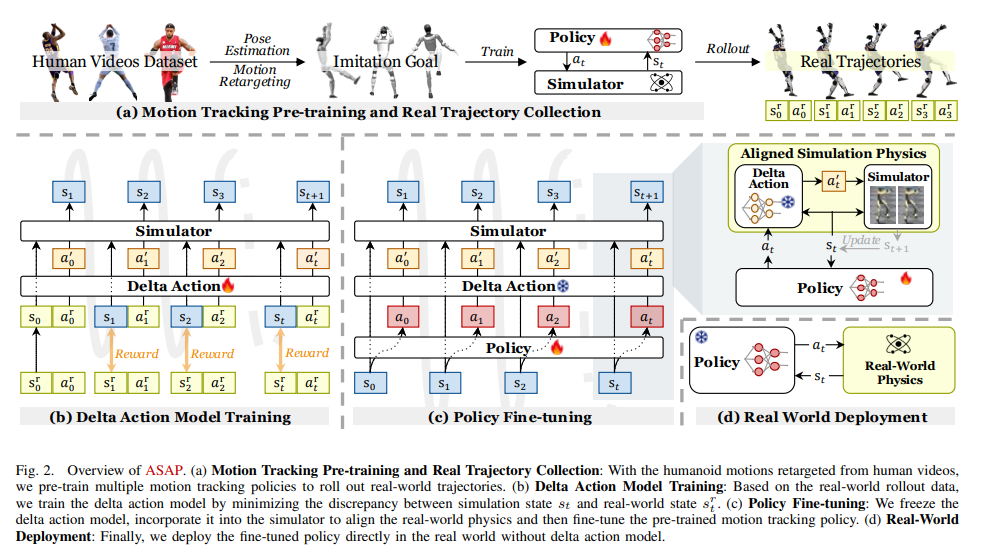
ASAP框架:有效解决仿真与现实世界之间的动力学不匹配问题,实现人形机器人在现实世界中的高效全身运动控制
论文ASAP: Aligning Simulation and Real-World Physics for...
Read MoreAndrej Karpathy分享对自动驾驶、机器人技术、AI教育以及人类与AI融合的看法
近日,AI大神Andrej Karpathy接受Youtube频道No Priors访谈,分享了他在多个前沿领...
Read MoreGenesis:通用机器人/具身人工智能/物理人工智能应用设计的综合性物理仿真平台
Genesis是一个综合性的物理仿真平台,旨在为通用机器人、具身人工智能和物理人工智能应用提供支持。它同时具备...
Read More

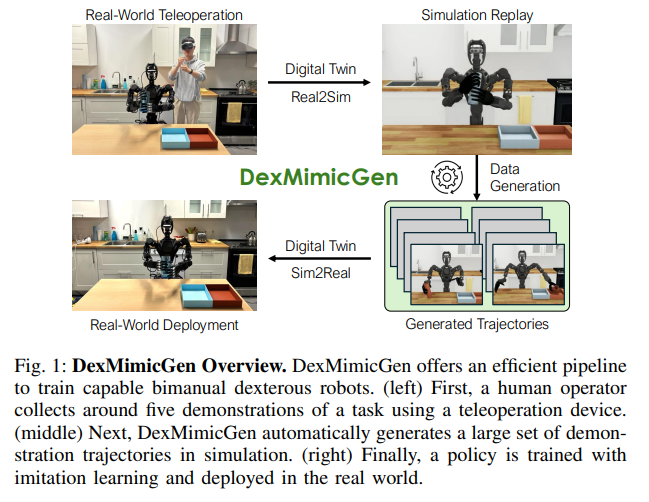
DexMimicGen:通过模仿学习实现双手灵巧操作的数据自动生成
论文DexMimicGen: Automated Data Generation for Bimanual D...
Read More
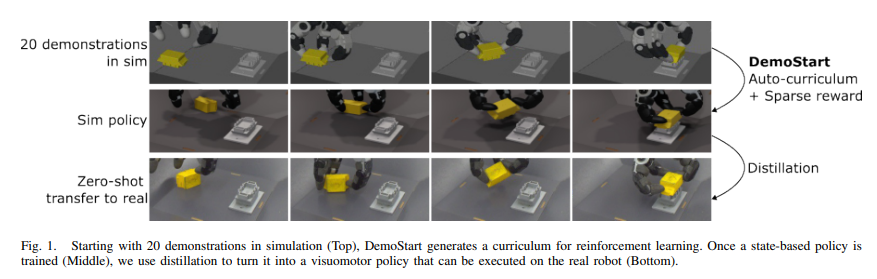
DemoStart:新强化学习方法,通过少量模拟演示和稀疏奖励,让三指机械手的器人学习复杂操作行为
论文DemoStart: Demonstration-led auto-curriculum applied...
Read More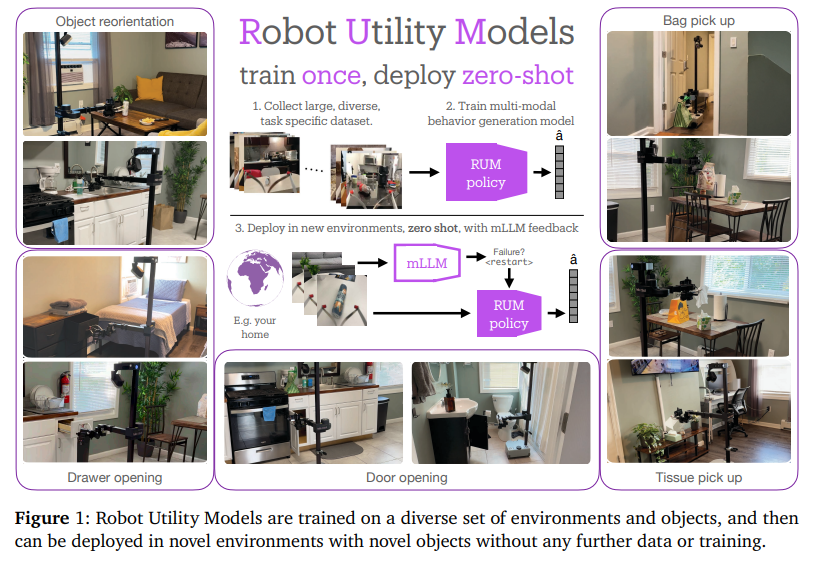
机器人效用模型(Robot Utility Models, RUM)实现零样本部署(Zero-Shot Deployment)
论文《Robot Utility Models: General Policies for Zero-Shot...
Read More